Принстонская разработка использует жидкокристаллические эластомеры и встроенную электронику, позволяя роботам двигаться за счёт управляемой деформации материала
Em vez de depender de motores, engrenagens ou compressores, uma equipa de engenheiros de Princeton encontrou uma forma de pôr robôs a mexerem-se com o próprio corpo. O resultado são robôs híbridos, ao mesmo tempo flexíveis e rígidos, que dispensam motores e bombas de ar - e conseguem movimentar-se sem desgaste mecânico, graças a deformações controladas do material.
A robótica macia procura movimentos suaves e a capacidade de mudar de forma, mas muitas soluções continuam presas a sistemas volumosos ou externos. Para contornar isso, a equipa de Princeton recorreu a um material imprimível específico - um elastómero de cristal líquido - e combinou-o com eletrónica flexível e impressão 3D, criando robôs que se movem através do aquecimento controlado do polímero.
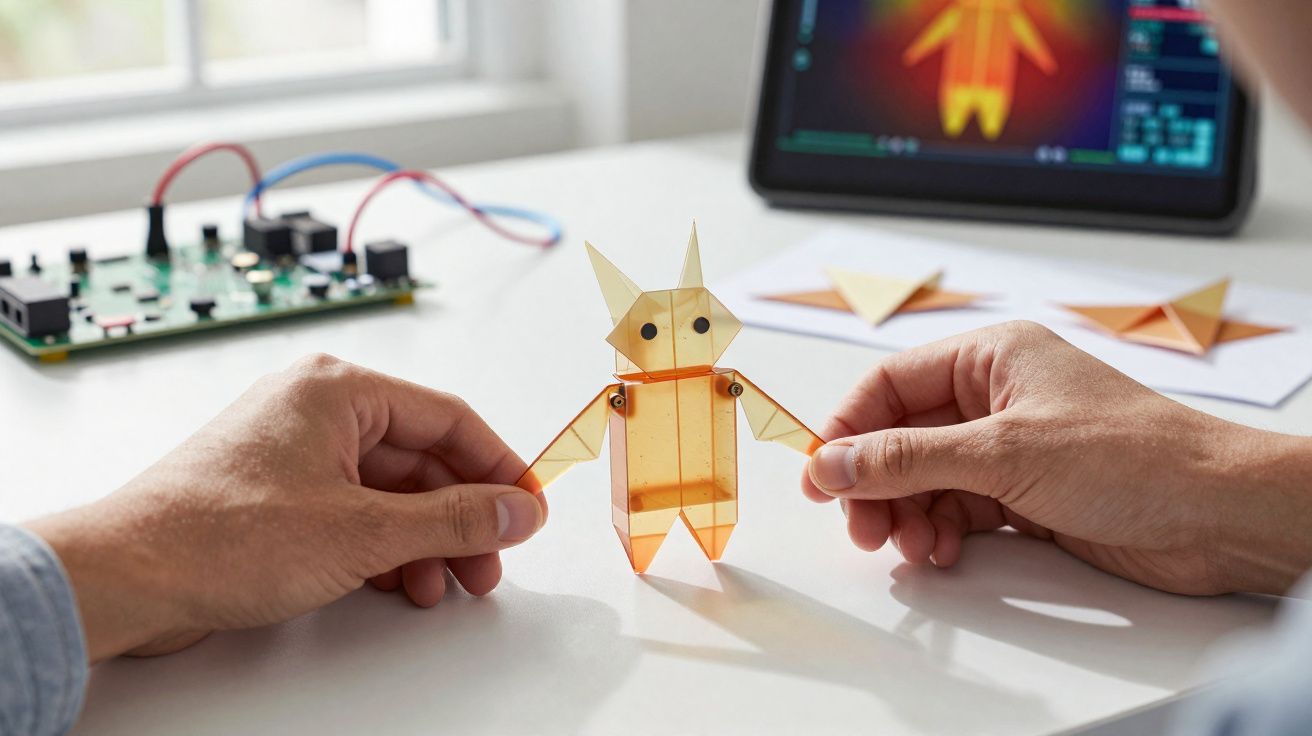
Como demonstração, foi construído um robô em forma de tsuru (o tradicional “pássaro” de origami). Quando exposto a um campo elétrico, o tsuru começa a bater as asas e a executar sequências de movimentos programáveis. A abordagem aponta novos caminhos para aplicações na robótica macia.
Com uma impressora 3D, a equipa imprimiu o polímero com zonas de padrões bem definidos. Devido ao elastómero de cristal líquido, as moléculas do polímero organizam-se numa estrutura ordenada. Ao programar a impressão, foi possível orientar as moléculas em direções específicas, formando dobradiças embutidas. Ao aquecer, essas dobradiças curvavam-se de forma previsível, gerando o movimento do robô.
A eletrónica flexível foi integrada diretamente nas dobradiças do material - a própria flexibilidade das placas permitiu essa incorporação no “corpo” do robô. O sistema foi pensado para aquecer áreas selecionadas do polímero, e sensores de temperatura integrados garantiram um controlo em malha fechada, permitindo ao robô reagir em tempo real.
Para obter movimentos mais precisos e repetíveis, a equipa reforçou as zonas entre as dobradiças com painéis finos de fibra de vidro, fixos às placas flexíveis. Assim, o robô conseguiu mover-se sem recurso a motores.
Para comandar movimentos como dobrar e desdobrar, foram usados modelos matemáticos baseados em padrões de origami. David Bershadsky, coautor do trabalho na Universidade do Texas, afirmou: «Главный вклад - это интеграция материаловедения и робототехники с акцентом на производственные возможности».
Bershadsky também criou uma ferramenta de software, disponível no GitHub, que ajuda a desenvolver robôs personalizados. A ferramenta inclui dados do artigo publicado na revista Advanced Materials, facilitando experiências e a evolução do trabalho.





Comentários
Ainda não há comentários. Seja o primeiro!
Deixar um comentário