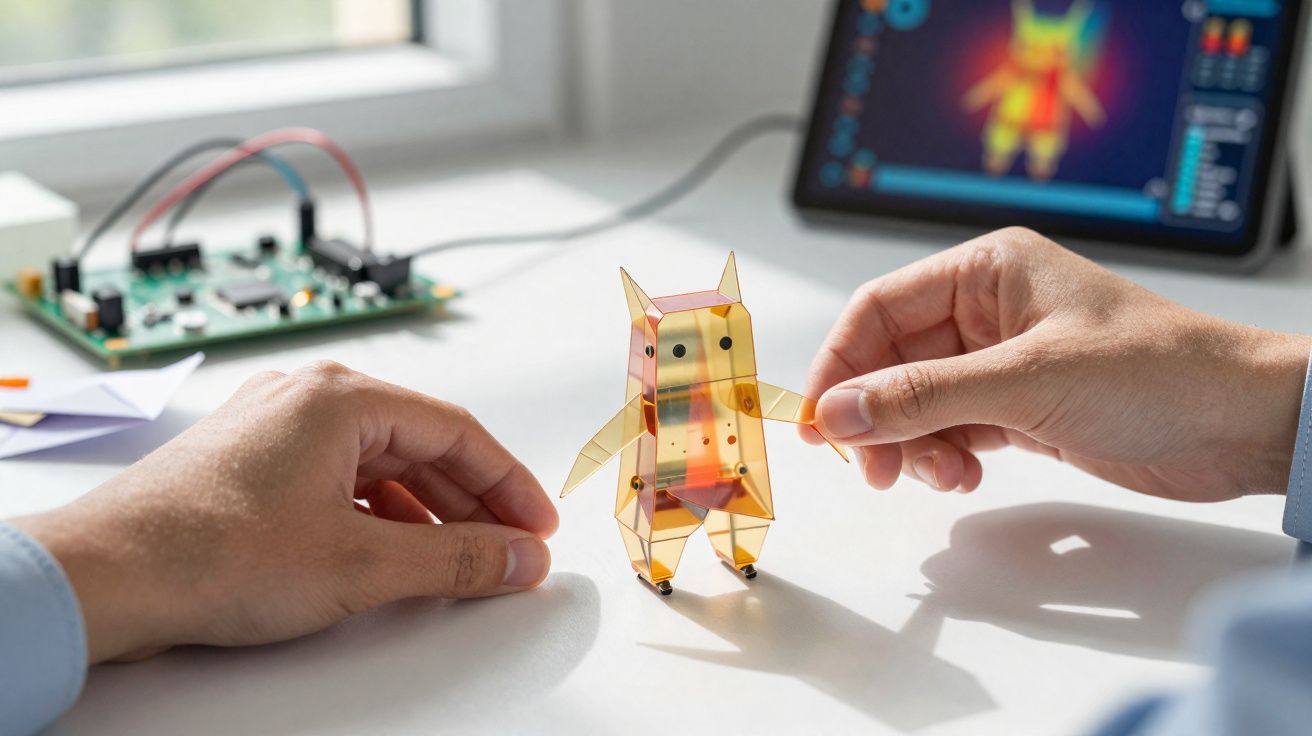
Принстонская разработка использует жидкокристаллические эластомеры и встроенную электронику, позволяя роботам двигаться за счёт управляемой деформации материала
E se um robô pudesse mover-se sem motores, sem pistões e sem bombas de ar - apenas “dobrando” o próprio corpo quando é aquecido? Foi essa a abordagem seguida por engenheiros de Princeton ao criarem robôs híbridos, simultaneamente flexíveis e rígidos, que dispensam componentes mecânicos tradicionais.
Na robótica suave, o objetivo costuma ser imitar movimentos fluidos e alterações de forma, mas muitas soluções acabam por depender de motores volumosos ou de sistemas externos. A equipa de Princeton contornou esse problema com um material impresso especial - um elastómero de cristais líquidos - combinado com eletrónica flexível e impressão 3D, permitindo que os robôs se movam através do aquecimento controlado do polímero.
Como demonstração, foi construído um robô com a forma de um grou de origami. Sob a ação de um campo elétrico, o grou começa a bater as asas, executando sequências de movimentos programáveis. A inovação abre novas perspetivas de aplicação na robótica suave.
Com uma impressora 3D, a equipa imprimiu o polímero com zonas específicas de padrões. Graças ao elastómero de cristais líquidos, as moléculas do polímero organizam-se numa estrutura ordenada. Ao programar a impressão, foi possível orientar as moléculas em direções determinadas, criando dobradiças embutidas. Quando aquecidas, essas dobradiças curvavam-se de forma previsível, garantindo o movimento do robô.
A eletrónica flexível foi incorporada nas dobradiças do material - a maleabilidade das placas de circuito impresso permitiu integrá-las diretamente no próprio corpo do robô. O sistema foi concebido para aquecer áreas específicas do polímero, e sensores de temperatura embutidos asseguraram um controlo em malha fechada, permitindo ao robô reagir em tempo real.
Para obter movimentos precisos e repetíveis, a equipa reforçou as zonas entre as dobradiças com painéis finos de fibra de vidro, fixados às placas flexíveis. Assim, o robô consegue deslocar-se sem recorrer a motores.
Para controlar movimentos como dobrar e desdobrar, foram usados modelos matemáticos baseados em padrões de origami. David Bershadsky, coautor do trabalho da Universidade do Texas, acrescentou: «O principal contributo é a integração da ciência dos materiais e da robótica, com foco nas possibilidades de fabrico».
Bershadsky também desenvolveu uma ferramenta de software, disponível no GitHub, que ajuda a criar robôs personalizados. Esta ferramenta inclui dados do artigo publicado na revista Advanced Materials, facilitando a experimentação e o desenvolvimento futuro.






Comentários
Ainda não há comentários. Seja o primeiro!
Deixar um comentário